2025 |
|
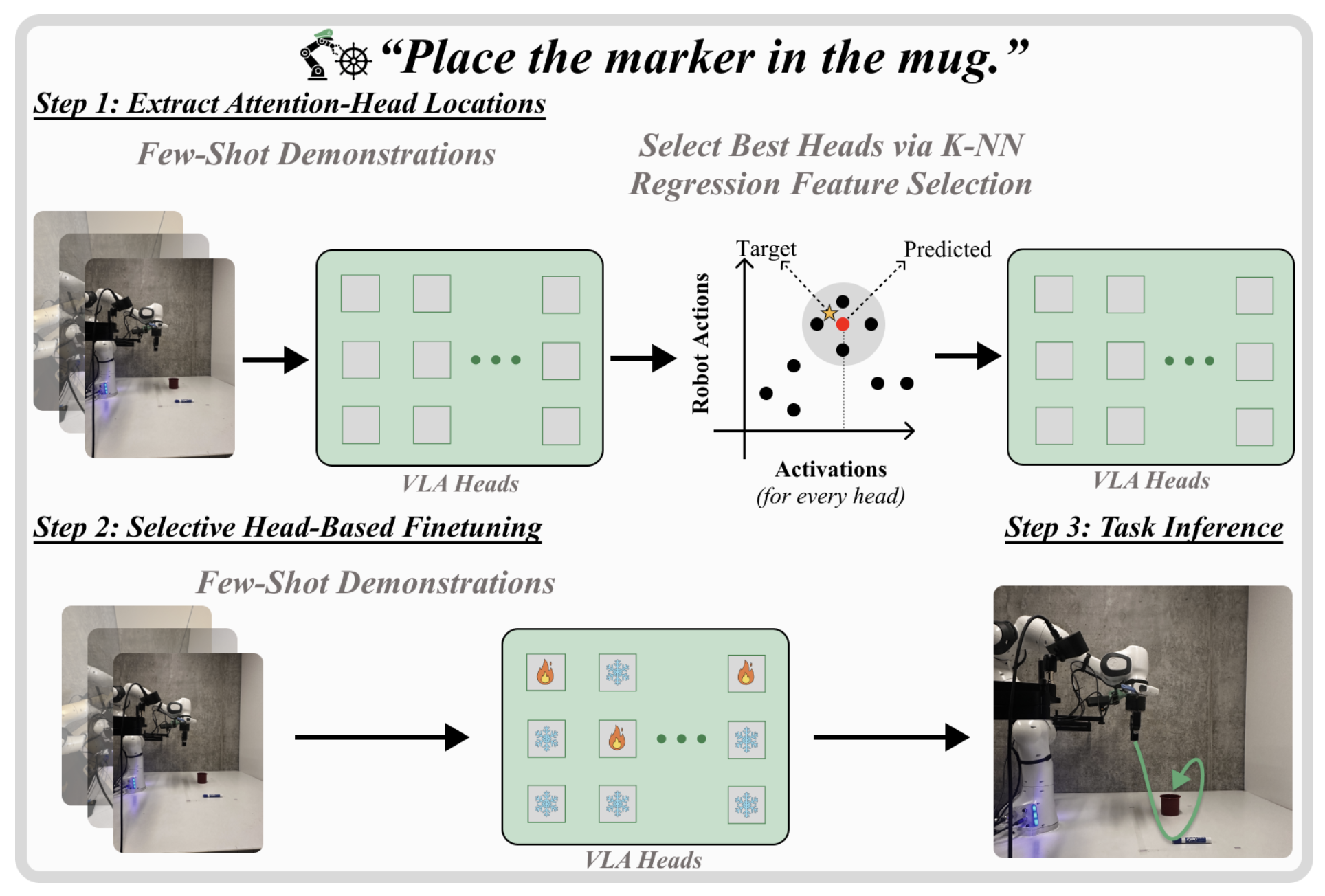
Mechanistic Finetuning of Vision-Language-Action Models via Few-Shot Demonstrations
Chancharik Mitra*, Yusen Luo*, Raj Saravanan*, Dantong Niu, Anirudh Pai, Jesse Thomason, Trevor Darrell, Abrar Anwar, Deva Ramanan, Roei Herzig
Robotic Steering is a mechanistic, few-shot finetuning approach for vision-language-action models that selectively adapts task-specific attention heads, achieving more robust, efficient, and interpretable robot learning than LoRA across diverse tasks.
In Submission
arxiv
|
|
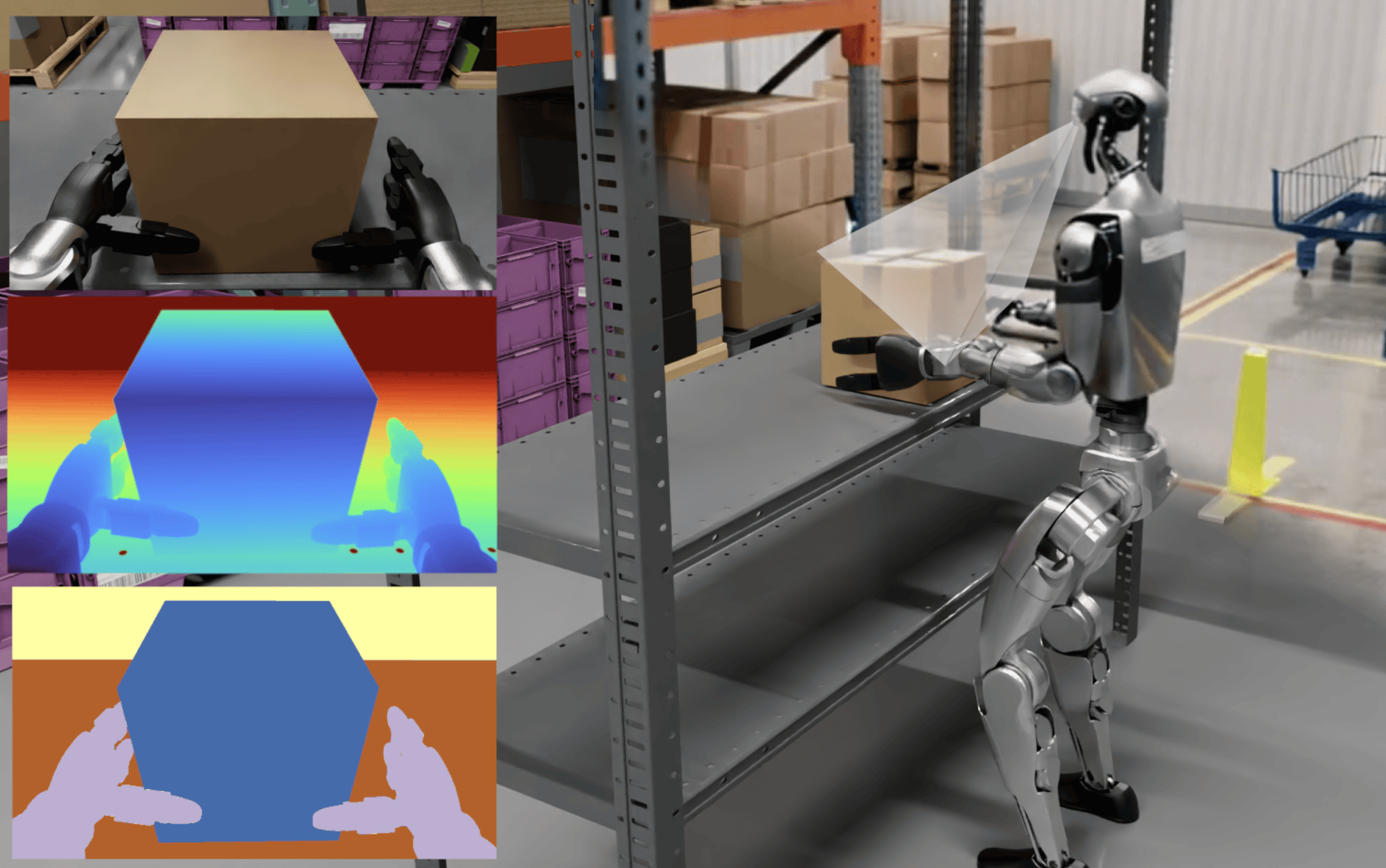
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
NVIDIA + me!
I helped introduce approaches for VLA post-training with IsaacLab!
Whitepaper
arxiv
|
|
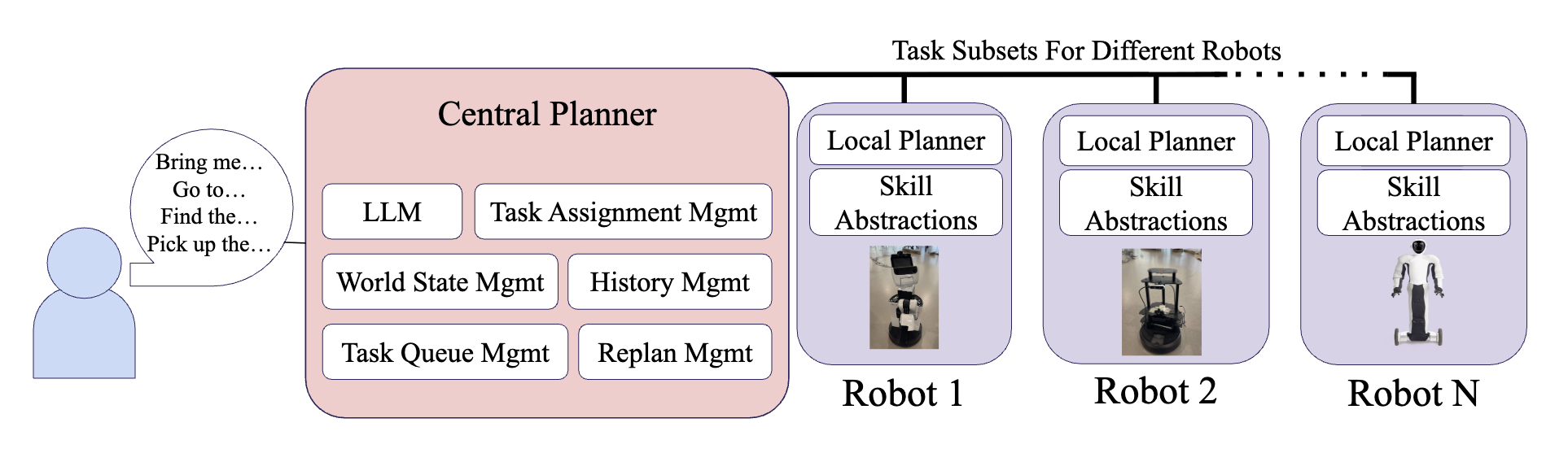
RobotFleet: An Open-Source Framework for Centralized Multi-Robot Task Planning
Rohan Gupta*, Trevor Asbery*, Zain Merchant*, Abrar Anwar, Jesse Thomason
RobotFleet is an open-source, extensible framework that introduces a centralized, modular autonomy stack to simplify scalable planning, scheduling, and execution for heterogeneous multi-robot fleets in open-world tasks.
Multi-Robot Systems Workshop @ RSS 2025.
arxiv
code
|

|
ReWiND: Language-Guided Rewards Teach Robot Policies without New Demonstrations
Jiahui Zhang*, Yusen Luo*, Abrar Anwar*, Sumedh Sontakke, Joseph Lim, Jesse Thomason, Erdem Biyik, Jesse Zhaing
We design ReWiND rewards that use language-guided rewards to train bimanual arms on OOD tasks in 1 hour!
We use offline-to-online, lang-conditioned, visual RL on action-chunked transformers on a real robot and in simulation!
CoRL 2025 (Oral Presentation)
RoboReps Workshop @ RSS 2025 (Best paper nominee)
OOD Workshop @ RSS 2025 (Best paper)
arxiv
website
twitter
|
|
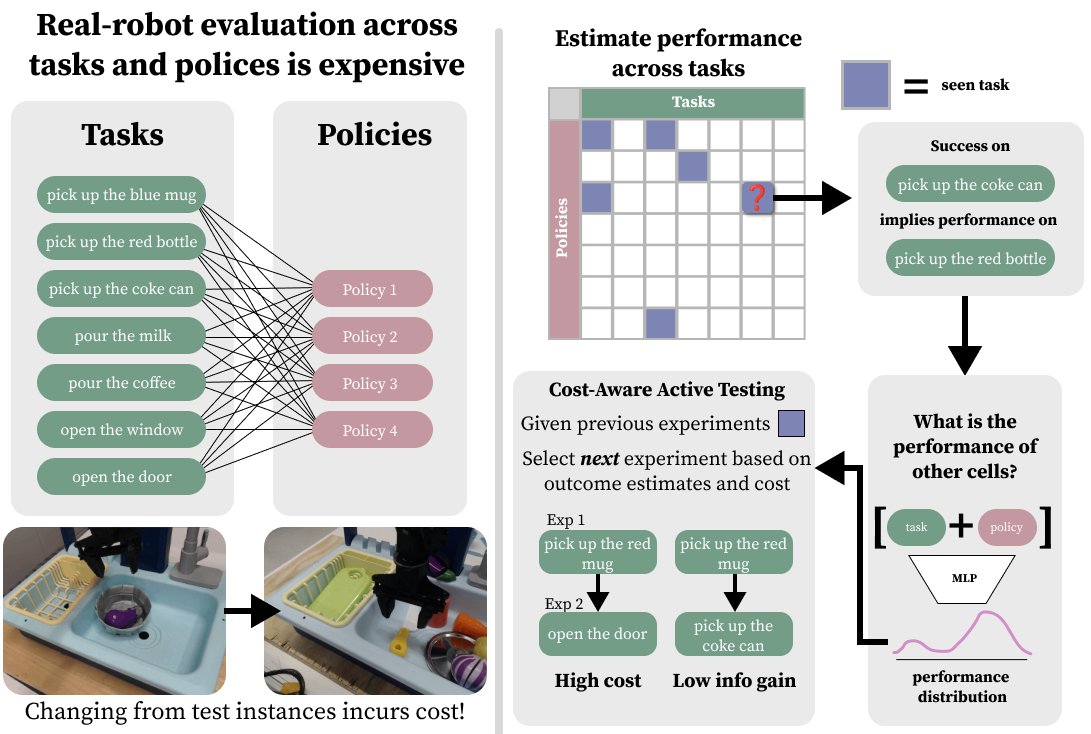
Efficient Evaluation of Multi-Task Robot Policies With Active Experiment Selection
Abrar Anwar*, Rohan Gupta, Zain Merchant, Sayan Ghosh, Willie Neiswanger, Jesse Thomason
The space of language commands a robot can execute grows combinatorially with scene complexity. Evaluating a robot on this large domain is impractical + takes time, so we introduce contrast sets for robots to make small perturbations to test instances. This leads to good test set estimation and less experimenter effort.
CoRL 2025
RobotEvaluation Workshop @ RSS 2025
arxiv
twitter
|

|
ReMEmbR: Building and Reasoning Over Long-Horizon Spatio-Temporal Memory for Robot Navigation
Abrar Anwar*, John Welsh, Joydeep Biswas, Soha Pouya, Yan Chang
To tackle long-horizon spatio-temporal memory, we introduce a retrieval-based approach for building and reasoning over memory.
We show improved performance on planning and embodied question answering given a long video history.
ICRA 2025
arxiv
code
website
blog
twitter

|
|
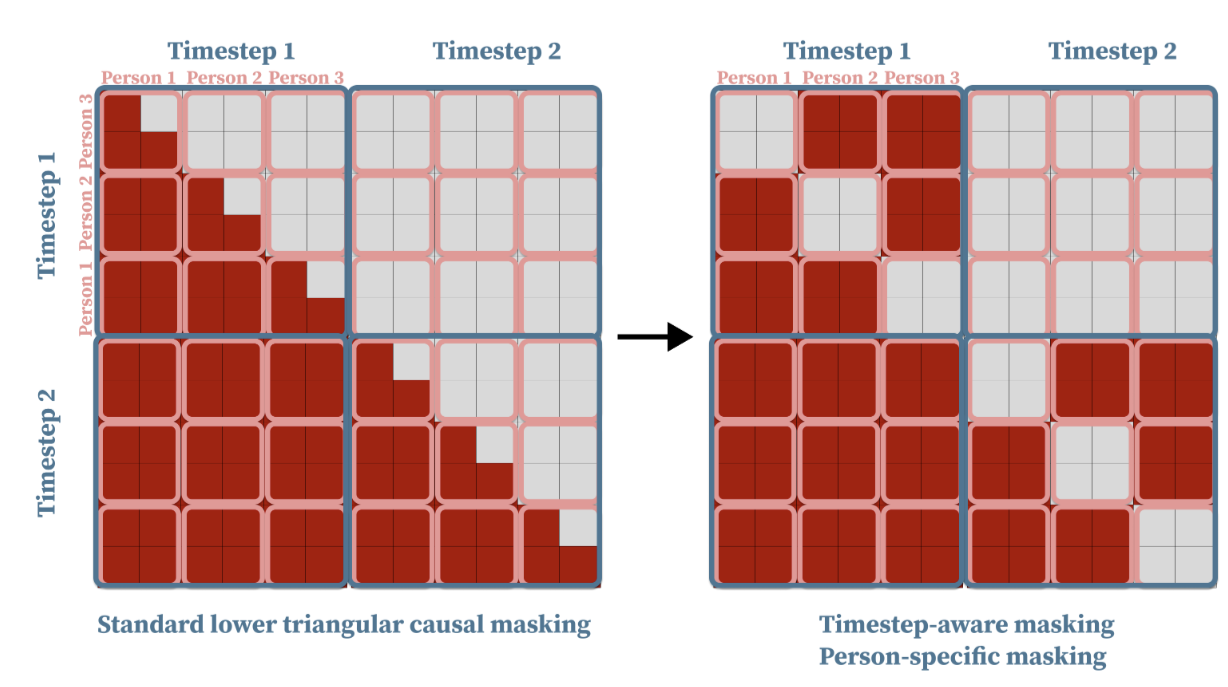
M3PT: A Transformer for Multimodal, Multi-Party Social Signal Prediction with Person-aware Blockwise Attention
Yiming Tang, Abrar Anwar, Jesse Thomason
M3PT is a causal multimodal transformer that jointly models social signals across multiple participants and modalities, improving prediction of behaviors like speaking and bite timing in multi-party human interactions.
Nonverbal Cues Workshop @ ICRA 2025 (Best paper)
arxiv
code
|
2024 |
|
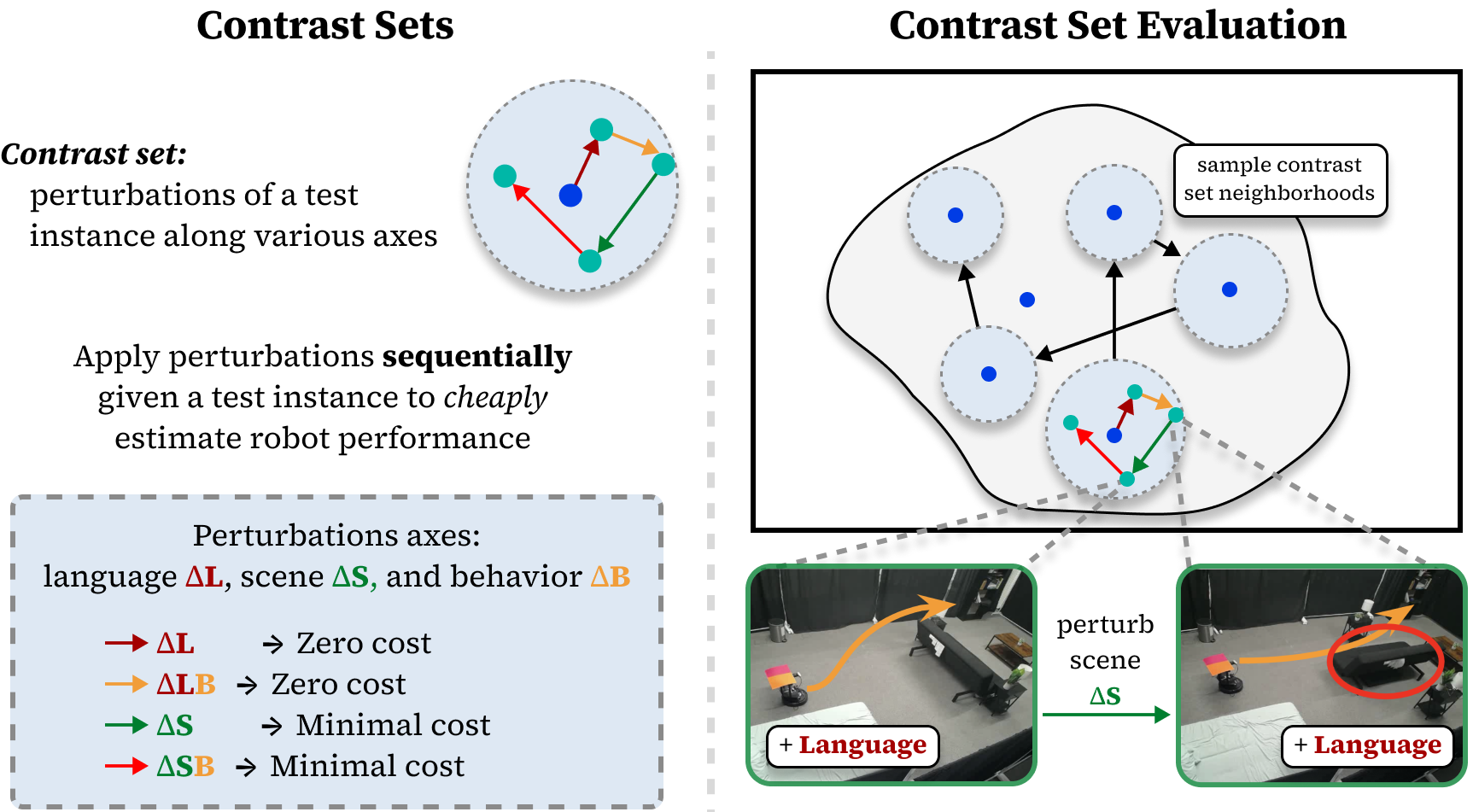
Contrast Sets for Evaluating Language-Guided Robot Policies
Abrar Anwar*, Rohan Gupta*, Jesse Thomason
The space of language commands a robot can execute grows combinatorially with scene complexity. Evaluating a robot on this large domain is impractical + takes time, so we introduce contrast sets for robots to make small perturbations to test instances. This leads to good test set estimation and less experimenter effort.
CoRL 2024
arxiv
twitter
|
|
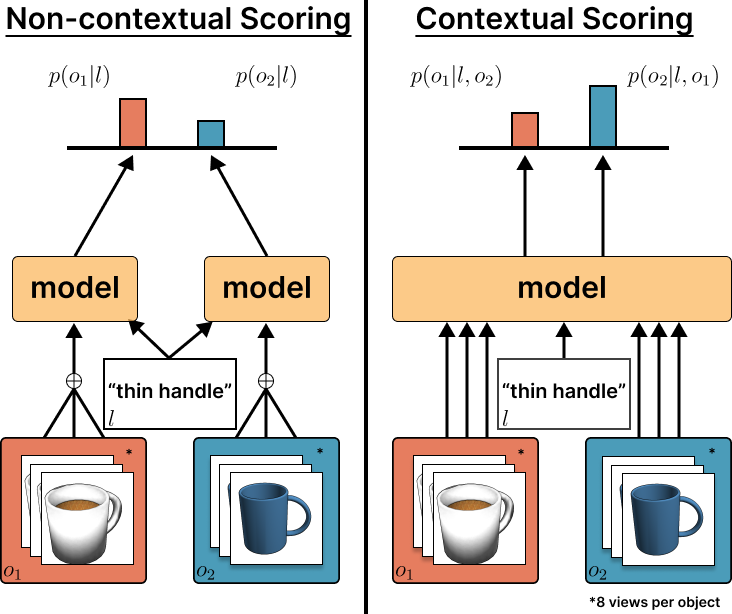
Which One? Leveraging Context Between Objects and Multiple Views for Language Grounding
Chancharik Mitra*, Abrar Anwar*, Rodolfo Corona, Dan Klein, Trevor Darrell, Jesse Thomason
We present the MAGiC model which selects an object referent based on language meant to distinguish between two similar objects by reasoning over both objects from multiple vantage points.
NAACL 2024
paper
arxiv
code
|
|
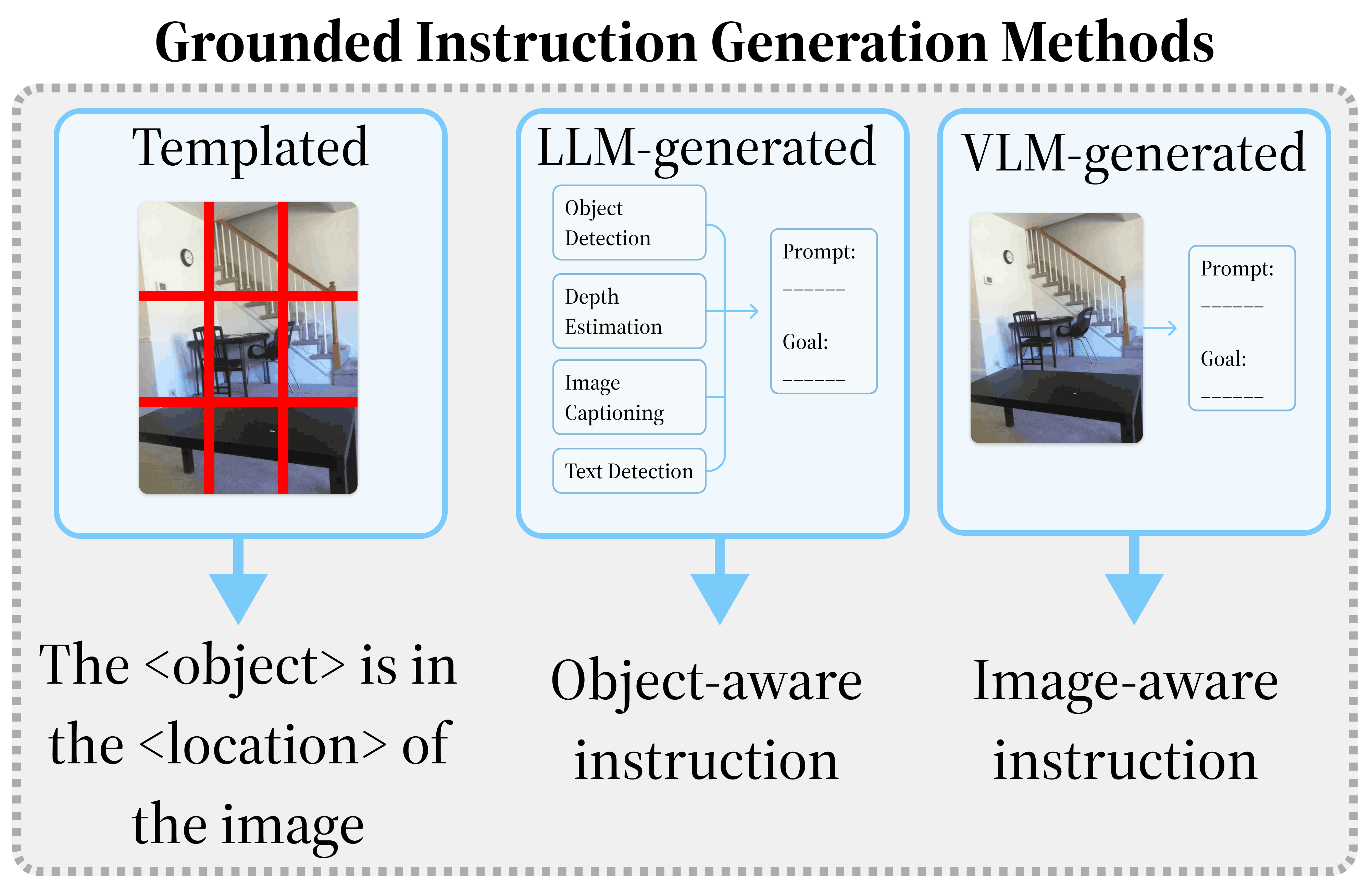
Generating Contextually-Relevant Navigation Instructions for Blind and Low Vision People
Zain Merchant, Abrar Anwar, Emily Wang, Souti Chattopadhyay, Jesse Thomason
Navigating unfamiliar environments presents significant challenges for blind and low-vision (BLV) individuals. We investigate how grounded instruction generation methods can provide contextually-relevant navigational guidance to BLV users.
ROMAN 2024 Late Breaking Report (LBR)
ROMAN 2024 Interactive AI Workshop (Best paper)
arxiv
|
|
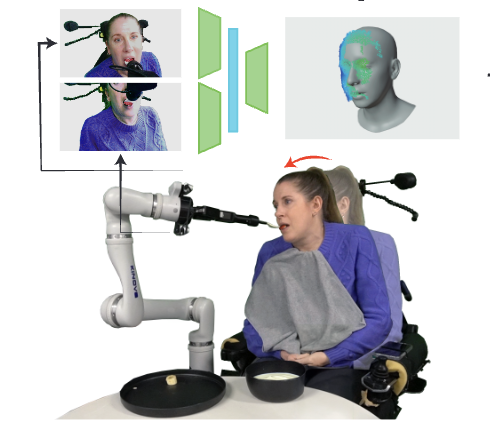
Feel the Bite: Robot-Assisted Inside-Mouth Bite Transfer using Robust Mouth Perception and Physical Interaction-Aware Control
Rajat Jenamani, Daniel Stabile, Ziang Liu, Abrar Anwar, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
We design a system to feed people with disabilities in their mouth using real-time mouth perception and tactile-informed control.
HRI 2024. (Best paper nominee)
arxiv
video
website
|
2023 |

|
Exploring Strategies for Efficient VLN Evaluation
Abrar Anwar*, Rohan Gupta*, Elle Szabo, Jesse Thomason
Evaluation in the real world is often time-consuming and expensive, so we propose a targeted contrast set-based evaluation strategy to efficiently evaluate the linguistic and visual capabilities of an end-to-end VLN policy.
Workshop on Language and Robot Learning (LangRob) @ CoRL 2023. (Oral Presentation)
paper
|
2022 |

|
Human-Robot Commensality: Bite Timing Prediction for Robot-Assisted Feeding in Groups
Jan Ondras*, Abrar Anwar*, Tong Wu*, Fanjun Bu, Malte Jung, Jorge Jose Ortiz, Tapomayukh Bhattacharjee
We develop data-driven models to predict when a robot should feed during social dining scenarios.
We build a dataset of human-human commensality, develop novel models to learn social dynamics of when to feed, and conduct a human-robot commensality study.
CoRL 2022
paper
arxiv
code
website
|
2021 |
|
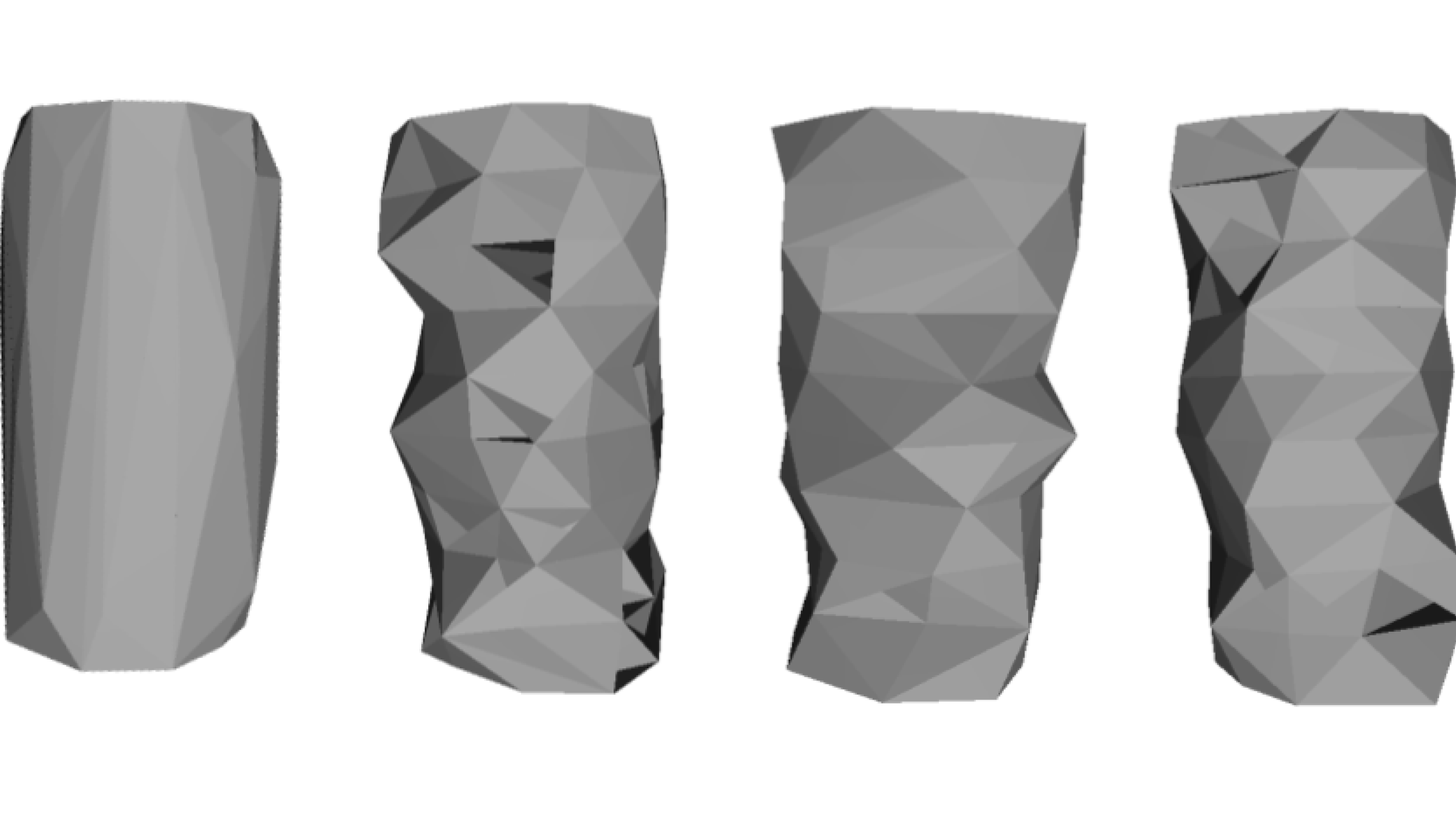
Deep Reinforcement Learning for Optimal Refinement of Cross-Sectional Mesh Sequence Finite Elements
Abrar Anwar
Developed the first deep reinforcement learning framework for mesh refinement and refined “good” quality surface reconstructions of cross-sectional contours using soft-actor critic
Honors Thesis, 2021
|

|
Watch Where You're Going! Gaze and Head Orientation as Predictors for Social Robot Navigation
Blake Holman, Abrar Anwar, Akash Singh, Mauricio Tec, Justin Hart, Peter Stone
We leverage virtual reality to collect gaze and position data to create a predictive model and a mixed effects model to show gaze orientation precedes other features
ICRA 2021
paper
video
|
2020 |
|
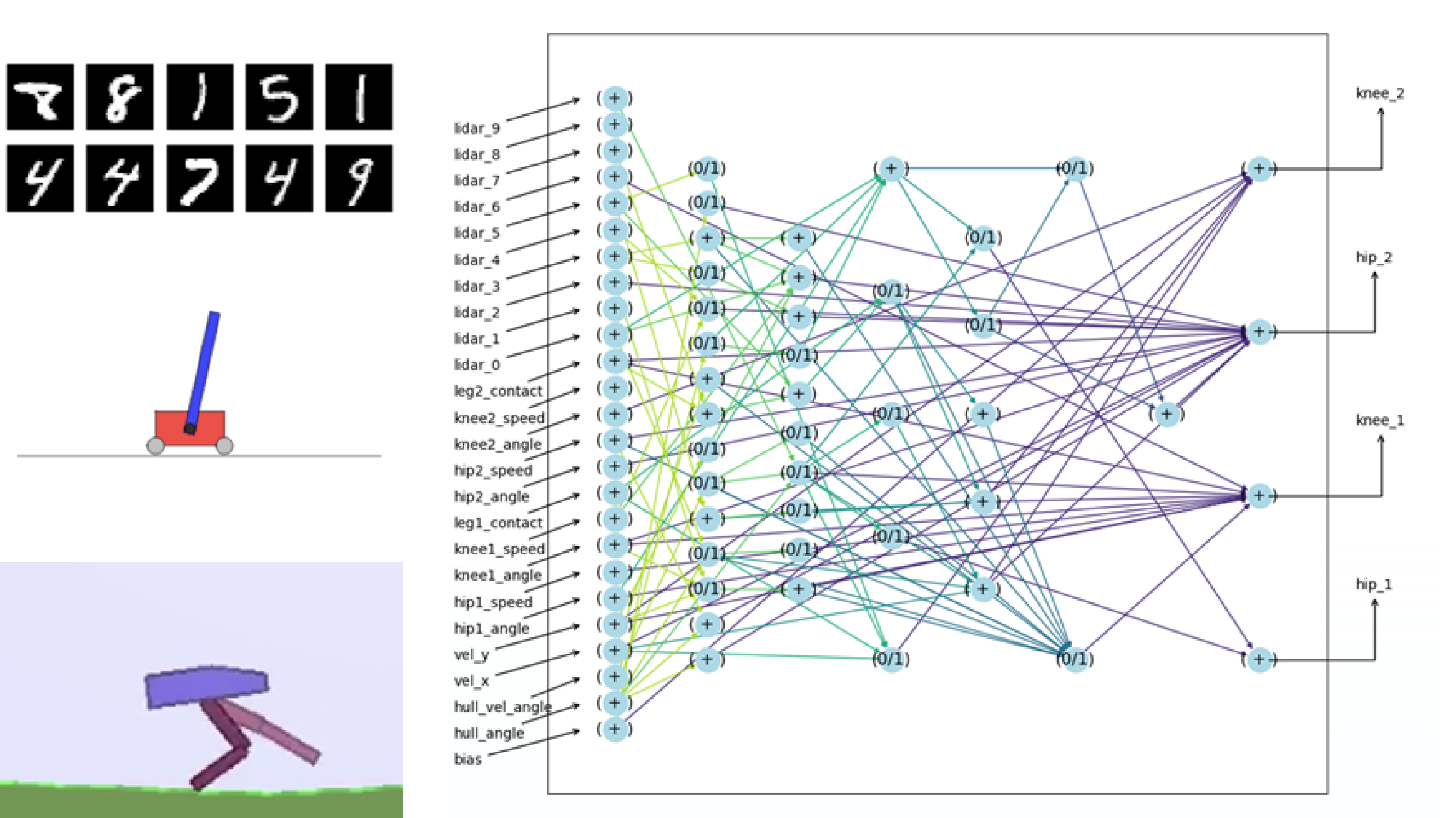
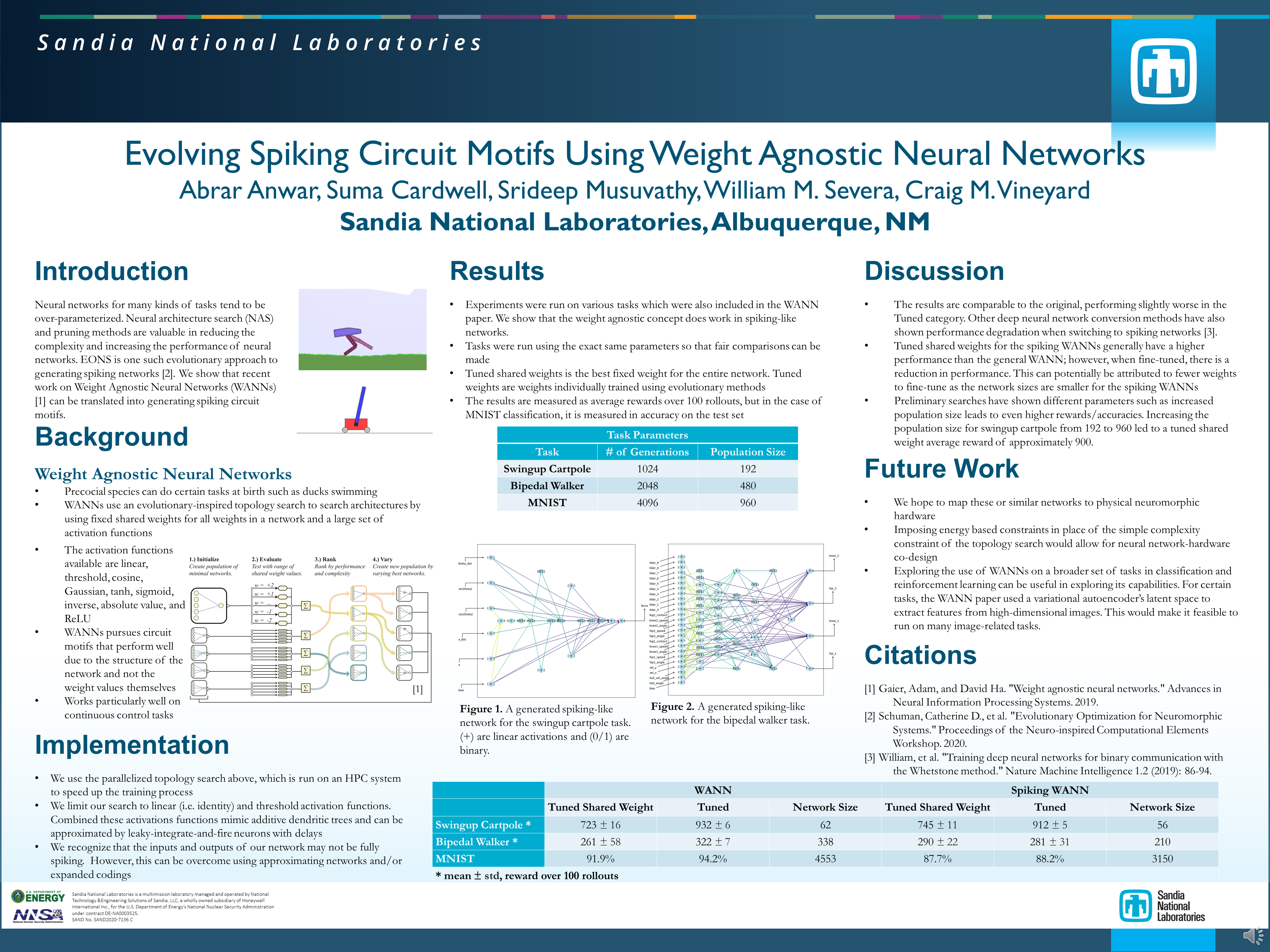
Evolving Spiking Circuit Motifs using Weight Agnostic Neural Networks.
Abrar Anwar, Craig Vineyard, William Severa, Srideep Musuvathy, Suma Cardwell
An evolutionary, weight agnostic method is used to generate spiking neural networks used for classification, control, and various other tasks
AAAI-21 Undergraduate Consortium , 2021
Computer Science Research Institute Summer Proceedings, 2020
International Conference on Neuromorphic Systems 2020 (poster)
paper
tech report
poster
|
2019 |
|
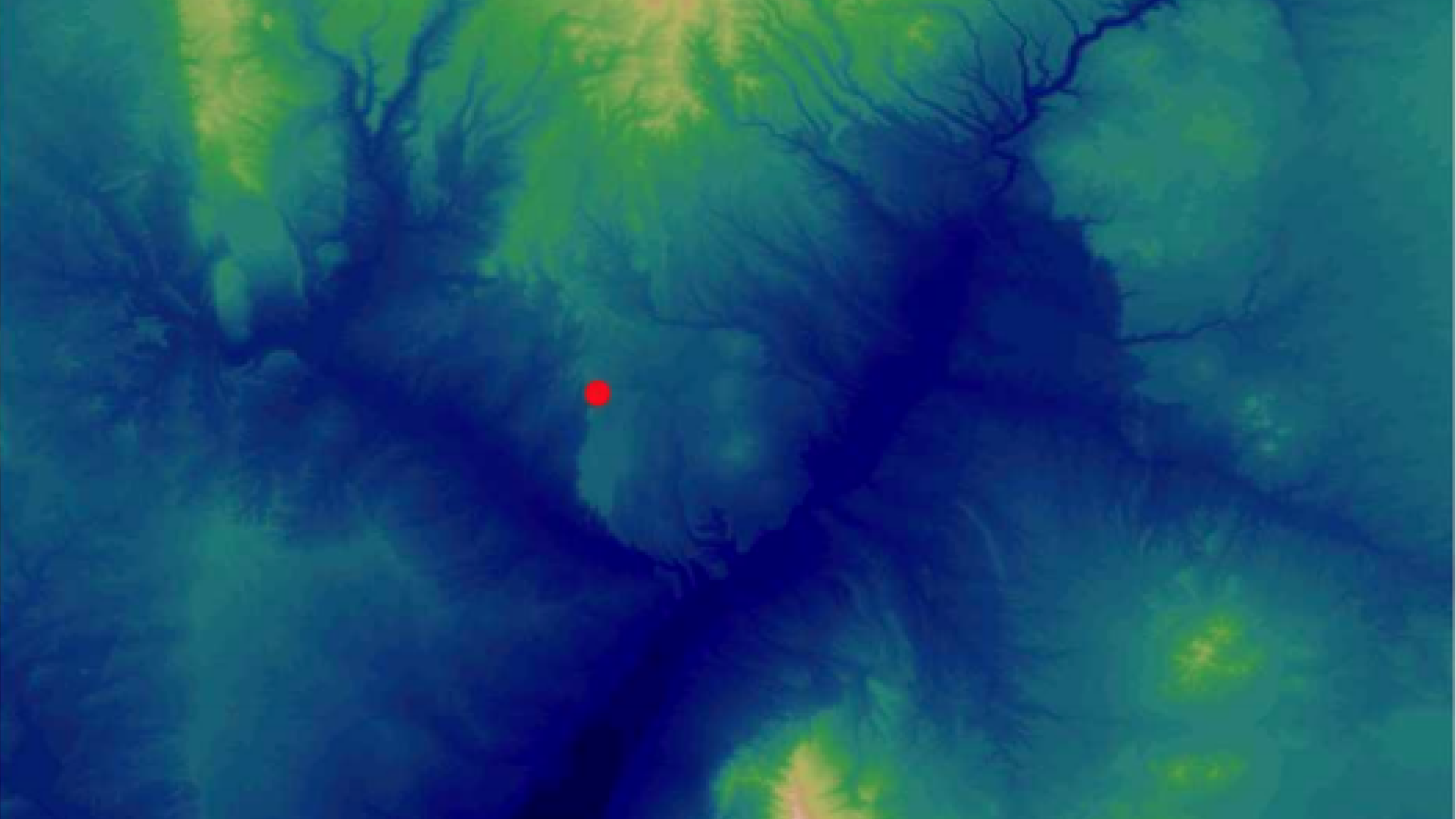
BrainSLAM: Robust autonomous navigation in sensor-deprived contexts
Felix Wang, James B. Aimone, Abrar Anwar, Srideep Musuvathy.
We explore using brain-inspired approaches to navigation and localization in a noisy, data-sparse environment for a hypersonic glide vehicle. Rotation invariant feature representations are used to increase accuracy and reduce map storage
Sandia National Labs Technical Report, 2019
tech report
|
|

{kind=link}